实验介绍
本章主要介绍大气压计的实现,EDU k1板载了SI的一款温湿度传感器SPL06,该传感器不但能测量大气压,还能测量温度。由于大气压的跟海拔成反比关系,如果知道当地大气压,则可以估算出当地的海拔高度。本章我们将向大家介绍如何使用haas1000来读取传感器信息,并把所有这些显示在OLED模块上。 开始学习之前我们先看一下显示效果。如下:
涉及知识点
- I2C通信原理
- SPL06大气压传感器原理
- OLED绘图
I2C通信原理
上一张已有介绍,这里不在赘述。
SPL06传感器简介
SPL06-007是歌尔推出的小型化数字气压传感器,具有高精度和低功耗的特点。SPL06-007既是压力传感器又是温度传感器。压力传感器元件基于电容式传感原理,确保温度变化时的高精度。小封装使SPL06-007成为移动应用和可穿戴设备的理想选择。 SPL06-007的内部信号处理器将压力和温度传感器元件的输出转换为24位结果。每个压力传感器已单独校准,并包含校准系数。这些系数用于将测量结果转换为真实压力和温度值。 SPL06-007有一个FIFO,可以存储最新的32个测量值。通过使用FIFO,主机处理器可以在两次读出之间的较长时间内保持休眠模式。这可以降低整个系统的功耗。传感器测量和校准系数可通过串行I2C接口获得。
主要特点
- 压力范围:300hPa到1100hPa(+9000米到-500米(与海平面有关))
- 温度范围:-40到+85°C
- 电源电压:1.7V到3.6V(VDD),1.2V到3.6V(VDDIO)
- 包装:带金属盖的LGA包装
- 封装:2.5mm x 2.0mm;
- 相对精度:±0.06hPa,相当于±0.5m
- 绝对精度:典型。±1hPa(300hPa到1100hPa)
- 温度精度:±0.5°C。
- 压力温度灵敏度:<0.5Pa/K
- 测量时间:典型值:28 ms;最小值:3 ms。
- 平均电流消耗:高精度:60μA,低功耗:3μA,待机:<1μA。
- I2C和SPI接口,嵌入式24位ADC
- FIFO:存储最新的32个压力或温度测量值。
- 无铅、无卤、符合RoHS
典型应用
- 增强GPS导航(航位推算、坡度检测等)
- 室内外导航
- 休闲体育
- 天气预报
- 垂直速度指示(上升/下降速度)
开发准备
硬件
1、开发用电脑一台 2、HaaS EDU K1开发板一个 (开发板内置SPL06传感器) 3、USB Type-C 数据线一根
硬件设计
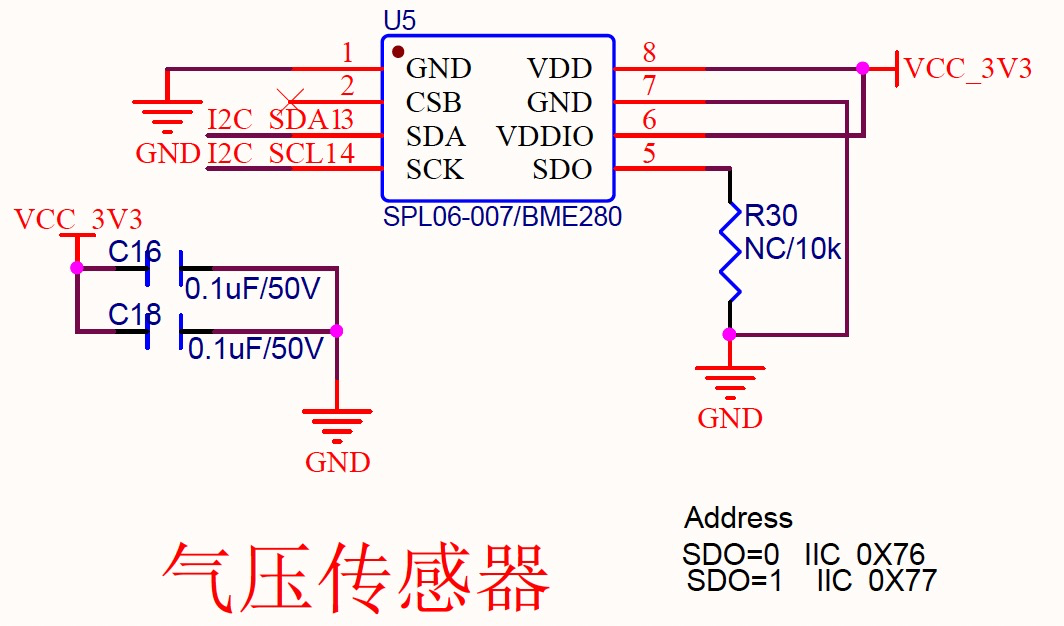
在本实验中,SPL06贴片在主板上,通过I2C与MCU通信,I2C从设备地址:0x77。 原理图如下所示:
SPL06特性
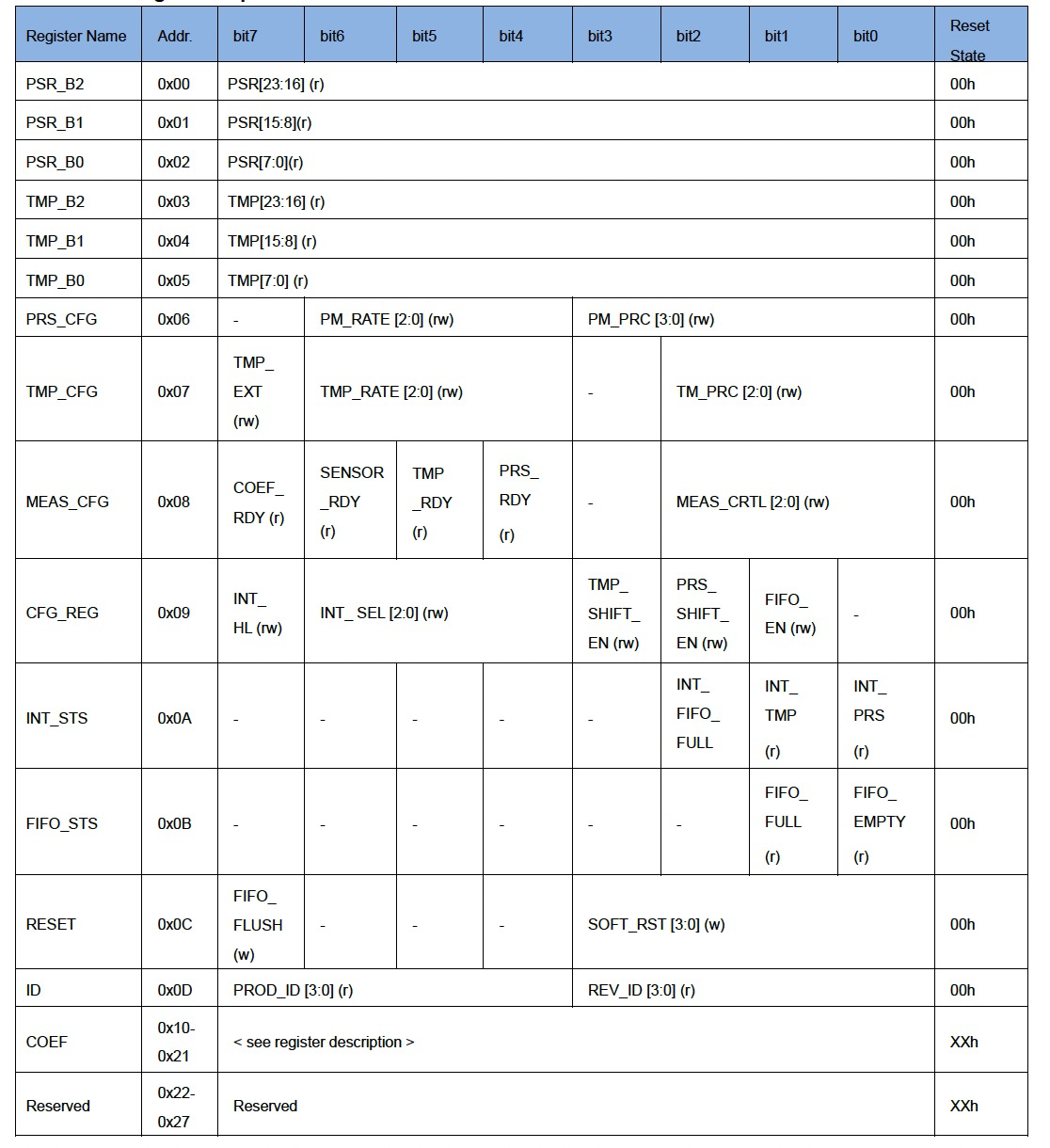
寄存器列表
读取大气压
压力数据寄存器
这个压力数据寄存器包含24位(3个字节)的压力值。



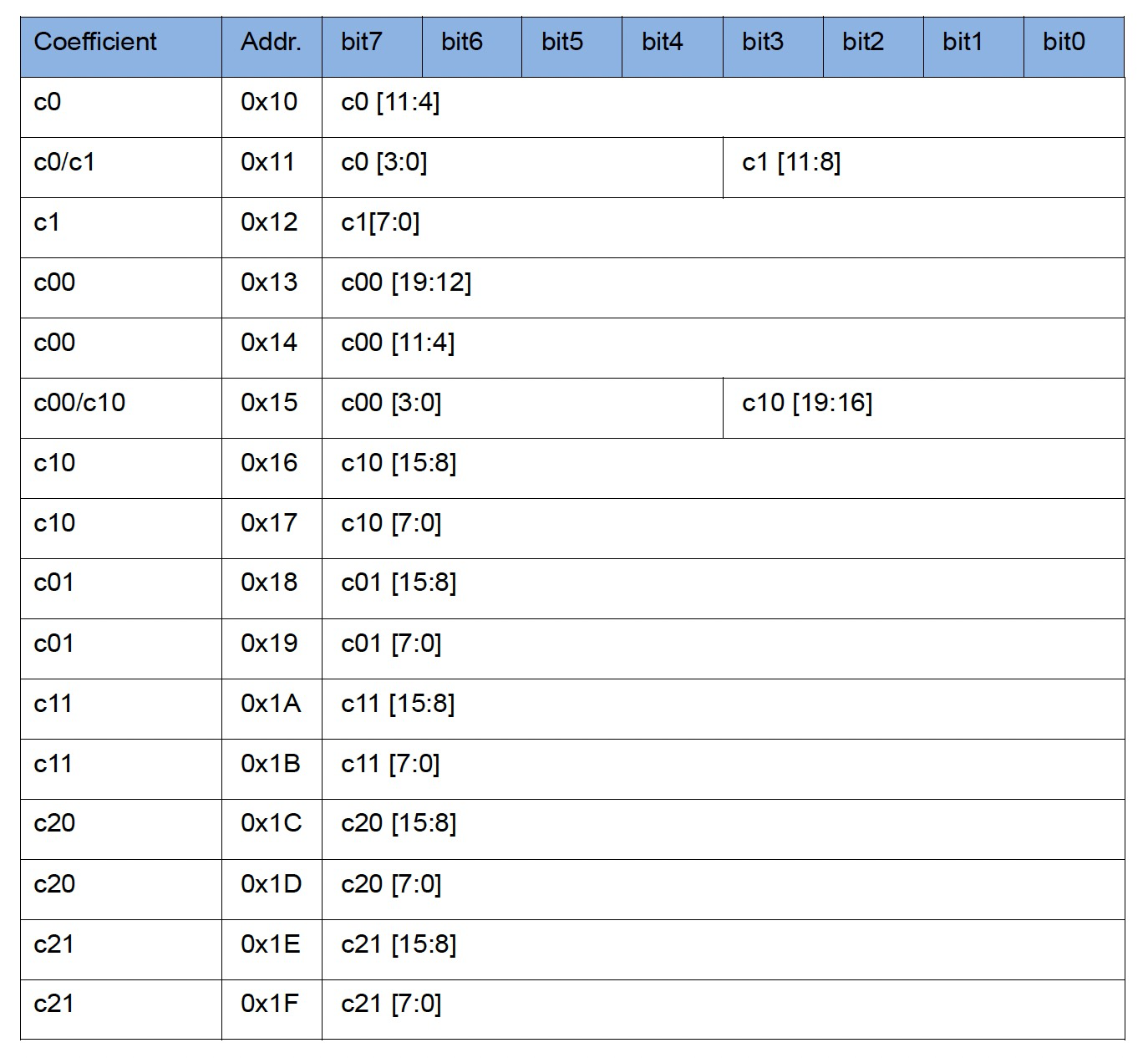
校准寄存器
校准系数寄存器包含用于计算补偿压力和温度值时所用的系数。
如何计算气压
1、从校准系数寄存器读取校准系数(c00、c10、c20、c30、c01、c11和c21)。 2、根据选定的精度速率选择比例因子kT(温度)和kP(压力)。表4列出了比例因子。 3、从寄存器或FIFO读取压力和温度结果。根据所选的测量速率,自上次压力测量后可能没有测量温度。 4、计算比例测量结果。 Traw_sc = Traw/kT Praw_sc = Praw/kP 5、计算补偿测量结果。 Pcomp(Pa)= c00+ Praw_sc*(c10+ Praw_sc*(c20+ Praw_sc*c30)) + Traw_sc*c01 + Traw_sc*Praw_sc*(c11+Praw_sc*c21)
读取温度
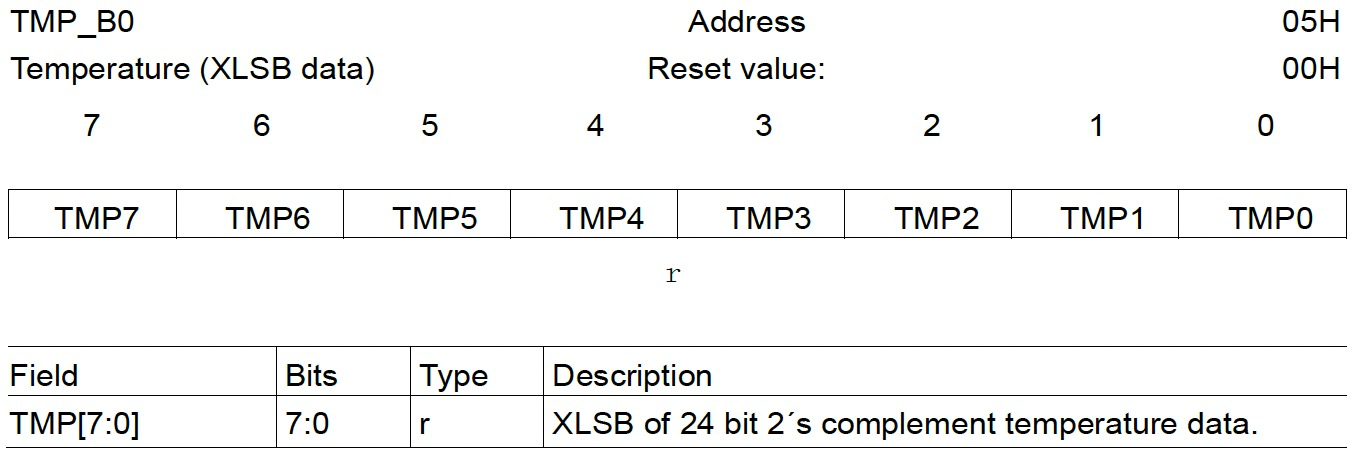
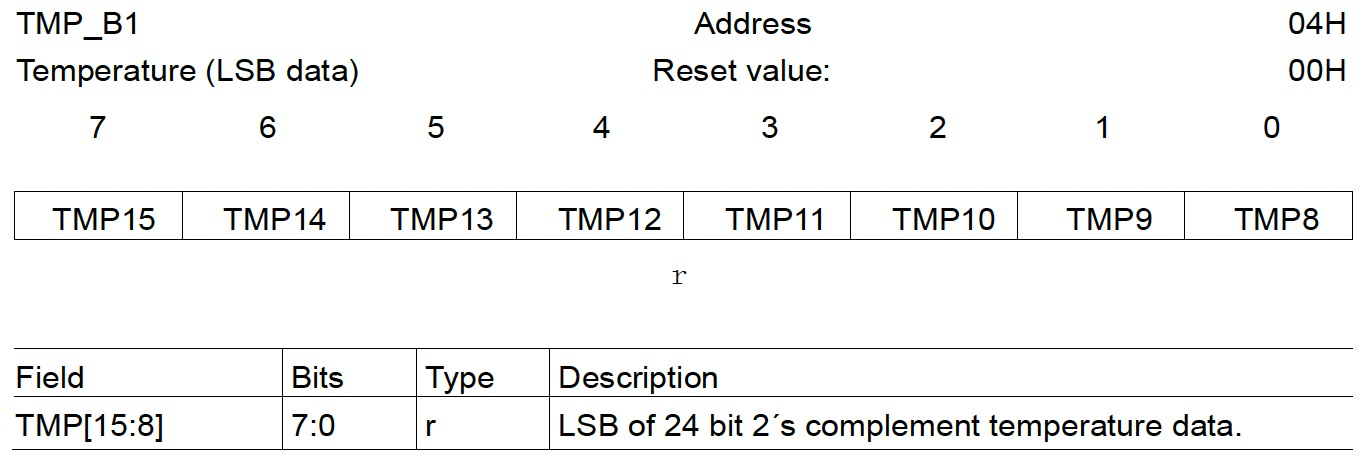
温度数据寄存器
温度寄存器同样保存着24位(3个字节)的温度数据。

如何计算温度
1、从校准系数(COEF)寄存器读取校准系数(c0和c1)。 2、根据选定的精度速率选择比例因子kT(温度),表4列出了比例因子。 3、从温度寄存器或FIFO读取温度结果。 4计算比例测量结果。 Traw_sc=Traw/kT 5计算补偿测量结果 Tcomp(°C)=c0*0.5+c1*Traw_sc
软件设计
应用代码部分
文件路径如下: solutions/eduk1_demo/k1_apps/barometer/barometer.c solutions/eduk1_demo/k1_apps/barometer/barometer.h
周期性读取大气压以及温度,并打印到OLED屏幕上。
驱动部分
驱动代码整体分为三部分;
- 初始化部分
- 温度值读取
- 大气压校准以及高度估算。
初始化包含:
- I2C初始化
- 芯片复位以及模式配置(包含压力以及温度模式配置,同时采集温度以及大气压,打开FIFO接收)i2c_dev.port = 1;i2c_dev.config.address_width = I2C_HAL_ADDRESS_WIDTH_7BIT;i2c_dev.config.freq = I2C_BUS_BIT_RATES_100K;i2c_dev.config.mode = I2C_MODE_MASTER;i2c_dev.config.dev_addr = 0x77;hal_i2c_init(&i2c_dev);printf("\nDevice Reset\n");i2c_eeprom_write_uint8_t(EEPROM_CHIP_ADDRESS, 0X0C, 0b1001);aos_msleep(100);tmp = i2c_eeprom_read_uint8_t(EEPROM_CHIP_ADDRESS, 0x0D);// printf("ID: %d\n", tmp);i2c_eeprom_write_uint8_t(EEPROM_CHIP_ADDRESS, 0X06, 0x03); // Pressure 8x oversamplingi2c_eeprom_write_uint8_t(EEPROM_CHIP_ADDRESS, 0X07, 0X83); // Temperature 8x oversamplingi2c_eeprom_write_uint8_t(EEPROM_CHIP_ADDRESS, 0X08, 0B0111); // continuous temp and pressure measurement//i2c_eeprom_write_uint8_t(EEPROM_CHIP_ADDRESS, 0X08, 0B0001); // standby pressure measurementi2c_eeprom_write_uint8_t(EEPROM_CHIP_ADDRESS, 0X09, 0X00); // FIFO Pressure measurement
温度读取及校准代码
气压读取及校准代码